A new ERA in space A different kind of perseverance
It is 11 meters long and has an even longer history: ERA (European Robotic Arm), developed and built by ESA, launched to the ISS with the Russian multipurpose laboratory module NAUKA. Its journey from idea to space underscores one more time: space is hard and it can take a long time to get there. Let’s take a look at this arm’s journey into space.
HERA for HERMES
The robotic arm was first conceived of as the Hermes Robot Arm (HERA), a “robot that will support the Hermes Spaceplane in its primary mission: the servicing of the Columbus Free Flyer”. As such it was presented in the 1992 IEEE International Conference on Robotics and Automation. The paper is available on the IEEE Explore site.

Let’s unpack this apparently simple sentence for fun. So HERMES was a proposed ESA space plane that was supposed to launch on Ariane 5 and carry crew to LEO. It was in essence a small Space Shuttle, complete with a cargo bay and the robotic arm to bring payloads from the cargo bay of the space plane onto a small space station. Planning started in the 80s, the first launch was planned for 1998, which then slipped to the early 2000s.
It’s initial destination was the Columbus Free Flyer – an ESA program to develop a space station. That was cancelled in 1991 while still in the planning stages. Aspects of the program were later realised in the Columbus science laboratory attached to the International Space Station (ISS).
So with no destination and – after the end of the cold war – with access to space for crewed missions through both NASA and the Russian space program, HERMES was cancelled in 1992. But the robot arm design did not go away.
#MIR2
The next proposed use was for MIR-2, a Soviet space station project initiated in 1976. This project went through different iterations, some smaller, some bigger. The one thing they had in common was that they were built around a core module called DOS-8, that would provide housing for the assembly crew. At one point the space station would have included up to four 90-tonne modules attached to the DOS-8 module. The huge modules were to be launched on Energia. That was a heavy lift rocket designed to bring payloads of up to 96 t to LEO or lift Buran, the Soviet space shuttle, into orbit.
Where the Soviets were planning MIR-2, the Americans were looking to build their own large space station called Freedom. But then, the Iron Curtain came down.
ISS – first attempt
in 1999 ESA published a short film outlining role ERA would play on the ISS.
Now plans were made to merge the two large scale space station projects into what would ultimately become the ISS. Those plans came to fruition fairly quickly. In 1993 Zarya was launched as the first module of the ISS, followed by the US built Unity connecting module and then – in 2000 – the russian modul Zvesda, otherwise known as DOS-8.
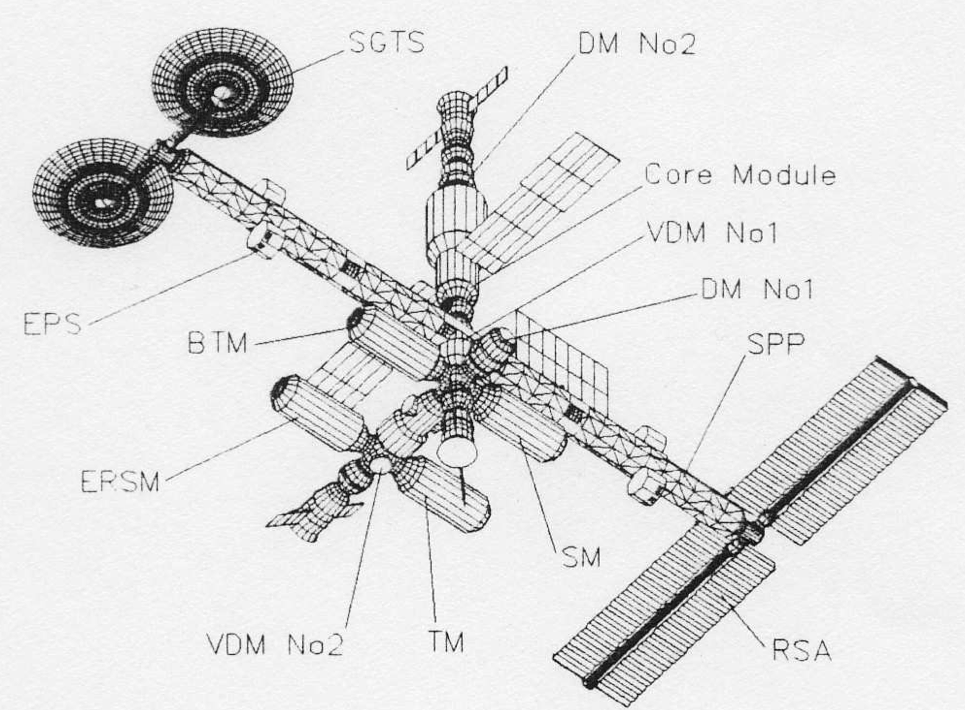
The European Robotic Arm (ERA), as it was by now called, was going to be placed on the Russian Science Power Platform, also part of the MIR-2 design. But at some point, as Philippe Schoonejans put it an episode of the ESA Explore Podcast, “that got canceled (…). And I think the Russians had then decided that it was OK for them to use the power coming from the very, very large American solar arrays on the American system.”
Canceled? Again? But wait: you get the power from another place, but it’s called Science Power Platform, so what about science (Nauka in Russian)?
Nauka
Fourth time lucky? Planning for more Russian science modules to be attached to Zarya and Zvesda went back to the 90s. But a lack of funds caused many delays. Finally, in 2004, the decision was made to use the Zarya replacement module to build Nauka. The module had already been about 70% complete since 1998, and had not been needed because of the successful 1998 launch of Zarya. In 2005, it was agreed to launch ERA together with Nauka.
There were delays, of course, and technical difficulties. But now, not even 30 years after it was described in a paper, it has launched to the ISS atop a Proton-M carrier rocket.
ESA’S 2021 piece on the launch of ERA
Another arm
The International Space Station of course already features two robotic arms: Canadarm2 and the Japanese Experiment Module Remote Manipulator System. Both play a crucial role in berthing visiting vehicles and grappling external payloads on the US and Japanese modules. So why send another one? Just because it’s been on the books since 1992? Of course not. The Canadian and Japanese arms cannot reach the Russian segment of the International Space Station. The different types of base points and payload mounting units do not allow them to operate in other parts of the Station.
Now that it has launched, things are far from done. If you want to listen to somebody go into more detail of how the thing is going to play out until it is finally fully installed and tested and then carry something for the first time maybe in March 2022, I recommend this ESA Explores Podcast episode with Philippe Schoonejans (ESA), ERA project Manager.
The ISS is very much about learning how to space. So ERA is not only a very serviceable tool, but it can also teach us lessons human-robotic interaction in space that will be very useful when we go on to the Moon and beyond.
ERA was largely funded by the Dutch government with Airbus Defense and Space Netherlands as its prime contractors. So on twitter you can find a thread by @DutchSatellites that shows some more early conceptual drawings from ESA and Fokker. It’s fun, have a look.
")

